Поворотное устройство YAESU G-5500 позволяет вращать антенно-фидерное оборудование как в горизонтальной, так и в вертикальной плоскости. Оно может быть использовано при работе через спутники и для связи с МКС. Устройсто состоит из двух частей: ротатора, установленного на крыше вместе с антенной и пульта дистанционного управления которое имеет стрелочную индикацию угла поворота. Внешний вид поворотного устройства YAESU G-5500 показан на рис.1

Рис.1. Поворотное устройство YAESU G-5500 (слева ротатор, справа пульт дистанционного управления)
Технические характеристики поворотного устройства YAESU G-5500 указаны в таблице1.
Талица 1. Технические характеристики YAESU G-5500
| Требуемый кабель | 12-проводной |
| Напряжение питания | 117/220 В |
| Тормозящий момент: | |
| Азимутальный ротатор | 40.0 кг*м |
| Ротатор угла места | 40.0 кг*м |
| Вращающий момент: | |
| Азимутальный ротатор | 14.0 кг*м |
| Ротатор угла места | 6.0 кг*м |
| Диаметр мачты | 38-63 мм |
| Диаметр бума | 32-43 мм |
| Вертикальная нагрузка: | |
| Азимутальный ротатор | 30.0 кг*м |
| Ротатор угла места | 200.0 кг*м |
| Время поворота: | |
| Азимутальный ротатор | 70 сек. |
| Ротатор угла места | 80 сек. |
| Площадь ветровой нагрузки | 1.0 м2 |
| K-Factor | 578 ft.-lbs |
| Вес | 7.5 кг |
Управление ротатором можно осуществлять с помощью штатного пульта управления, а также с помощью внешнего автоматизированного устройства.
Интерфейс управления YAESU G-5500 внешним устройством показан на рисунке 2. Принцип работы повороткой YAESU G-5500 заключается в следующим. Есть две плоскости вращения: горизонтальная и вертикальная. Угол поворота устройство сообщает уровнем напряжения (Пины 6 и 1), и находится в диапазоне от 2 до 4.5 В в зависимости от угла ( от 0 до 450 градусов для горизонтельной плоскости и 0 до 180 градусов для вертикальной). Включение поворота определяется низким логическим уровнем (0) на соответствующих контактах : 2-4 для горизонтальной плоскости, 5-3 для вертикальной. Пин 7 является источником постоянного тока напряжением 6-13 В, при токе до 200мА. Пин 8 — земля.
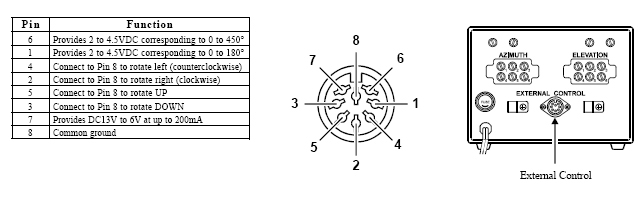
Рис.2. Интерфейс управления YAESU G-5500 внешним устройством. Распайка разъема.
Задача микроконтроллерного устройства управления поворотом ротатора заключается в преобразовании полученного от ПЭВМ, через интерфейс USB, требуемого угла поворота и сформировать последовательность управляющих логических сигналов на пины 2-4 и 5-3, чтобы максимально быстро повернуть ротатор. Информация о том что угол достигнут измеряется с помощью АЦП через пины 6 и 1.
Электрическая принципиальная схема внешнего устройства управления показана на рис. 3. Сердцем устройства является микроконтроллер DD1 фирмы Atmel ATmega8. Интерфейс связи с ПЭВМ USB версии 1 осуществляется программно. Питается устройство от порта USB. Микросхема ULN2003A представляет собой сборку транзисторов Дарлингтона и используется в роли буфера. Резисторы R6-R9 ограничивают коллекторный ток. Светодиод D1 используется для отображении логики работы устройтсва (на схеме рис.3. ошибочно перепутано включение А-К) Резисторы R2-R3 и R4-R5 делители напряжения, конденсаторы C1 и C2 фильтры низких частот. Разъем J3 используется для программирования посредством микроконтроллерного ISP интерфейса. Кварцевый резонатор X1 и конденсаторы C5 и C6 — часть схемы задающего тактового генератора микроконтроллера, обеспечивающего по сравнением с RC внутренней задающей цепочкой более высокую точность необходимую для USB интерфейса и работы АЦП.
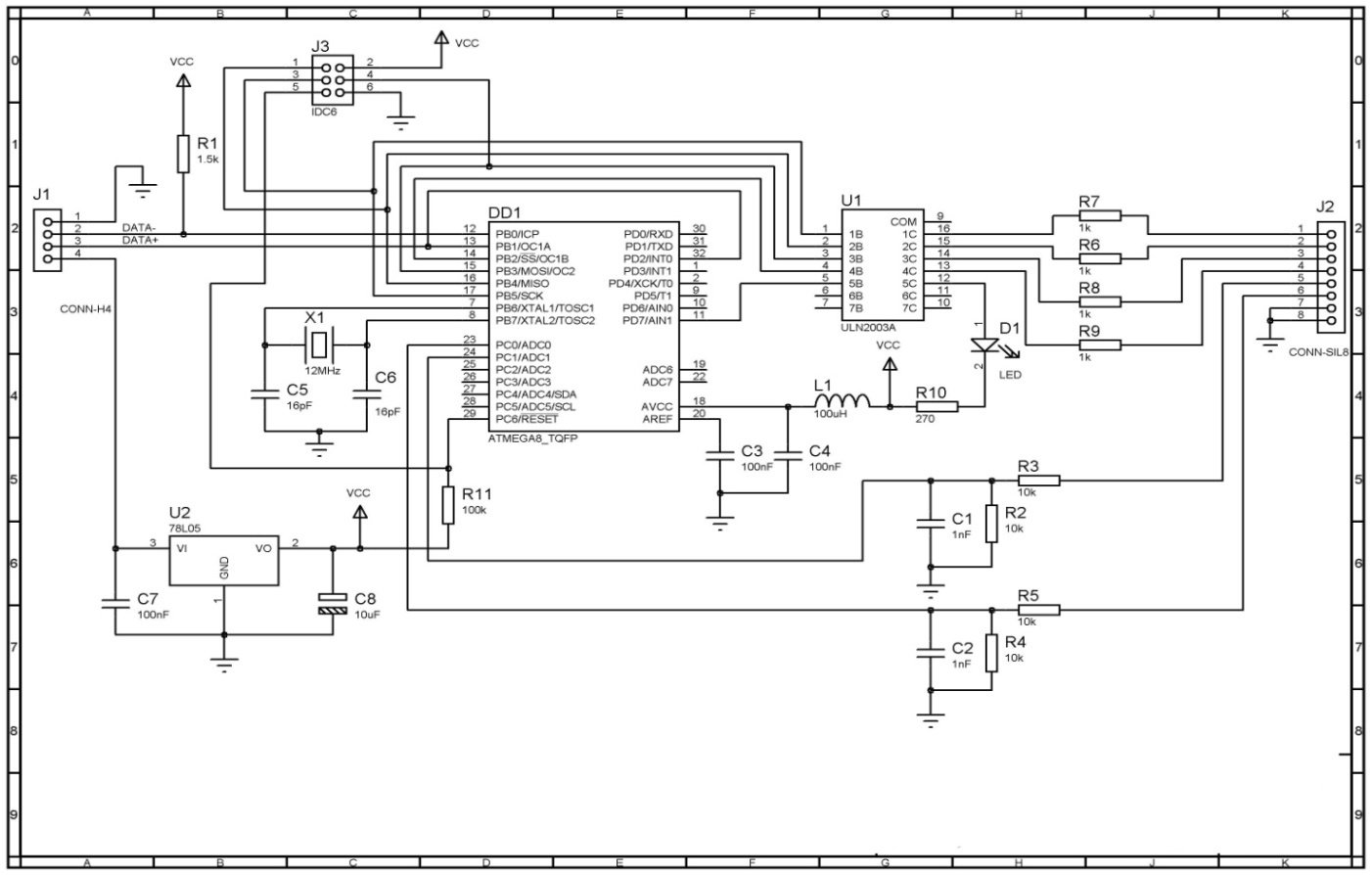
Рис.3. Электрическая принципиальная схема внешнего устройства управления.
На рисунке 4 показана печатная плата устройства. Выбраны SMD компаненты как более компактные и удобные в монтаже (не нужно сверлить плату).
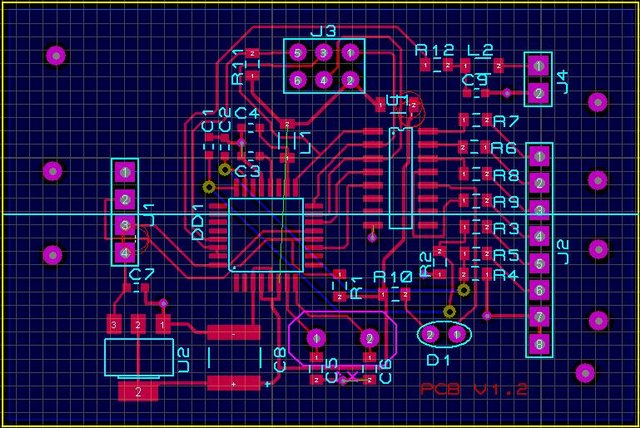
Рис.4. Печатная плата внешнего устройства управления.
На рисунке 5 показан монтаж компонентов на печатной плате. Для предотвращения переломов проводов, они жестко притянуты пластиковыми мотнажными хомутиками к плате
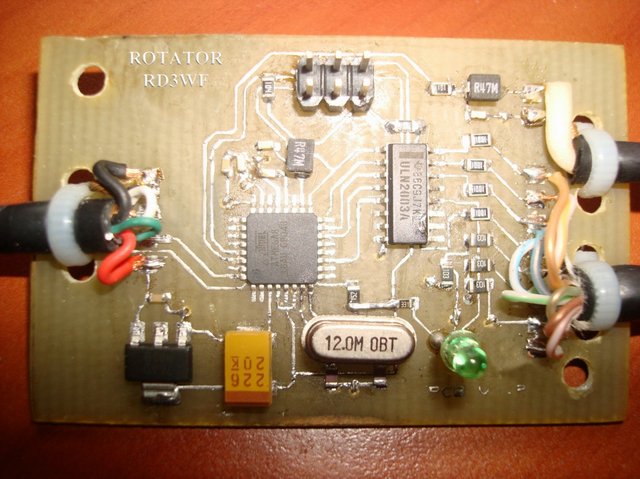
Рис.5. Монтаж компонентов на печатной плате
Устройство в собранном виде показано на рис.6. Плата помещена в защитный пластиковый кожух.

Рис.6. Внешний вид собранного устройства
Проектирование интерфейса велось в программном комплексе Proteus.
Файлы для скачивания
Проект устройства для программы Proteus, программа драйвер для ПЭВМ, прошивка для микроконтроллера
___________________
Авторы: Медведев Николай (RD3WF), Луценко Антон(R3W-128)
Хорошо бы еще, указать фьюз-биты для прошивки.